安科瑞電氣股份有限公司 全國咨詢熱線:18721095759

PRODUCT CLASSIFICATION
產品分類 更新時間:2020-10-27
更新時間:2020-10-27  瀏覽次數:530
瀏覽次數:530安科瑞電氣股份有限公司 上海嘉定 20201027
摘 要:以低壓電動機熱過載保護為研究對象,在分析熱過載保護的電流反時限特性模型和熱積累模型的基礎上,介紹了一種熱過載保護裝置的設計方法。主要對保護裝置的總體結構、部分硬件電路設計和保護算法設計進行了分析,并給出了保護裝置的部分測試和檢驗結果。實驗表明,該保護裝置具有較高的檢測精度,*滿足低壓電動機熱過載保護的需要。
關鍵詞:低壓電動機;熱過載;電流反時限特性;熱積累;保護裝置
0 引言
隨著國民經濟的快速發展,低壓異步電動機作為主要的低壓動力設備之一,被廣泛地應用在生產生活中的許多領域。電動機在運行過程中,經常遇到堵轉、過負荷、缺相、短路、三相不平衡等故障,導致電動機電流過大,內部溫度升高,電動機的溫升可能超過允許溫升,引起電動機的熱過載。熱過載發生時,會引起電動機定子絕緣老化,縮短電動機的使用壽命,甚至造成電動機的燒毀,引發生產事故,因此,需要對電動機的熱過載進行保護,使電動機能夠安全運行。
1 電動機熱過載保護模型
1.1 基于電流反時限特性的熱過載保護
電動機過載時會導致電動機過熱,但其低倍過載又允許一定的時限,所以電動機的過載特性具有反時限特性。傳統的電動機熱過載保護是利用電流反時限特性來實現的。根據電工委員會標準(IEC255-3)和英國標準規范(BS142)的規定,一般采用下面幾種標準反時限特性曲線 。
一般反時限特性曲線為


非常反時限特性曲線為


特別反時限特性曲線為


其中:t 為反時限保護動作時間;I 為采樣電流值;Ip為反時限保護基準電流整定值;Tp為反時限保護時間常數整定值。
基于電流反時限特性的熱過載保護一般采用查表法,運算簡單,容易實現,在電動機電流超過基準電流整定值時進行延時保護。該保護模型可以與不同的電動機進行匹配,滿足不同應用場合的保護要求,但該模型只考慮發熱,而未考慮散熱條件的變化以及電動機的熱積累。
1.2 基于熱積累模型的熱過載保護
在電動機熱積累模型中,假定電動機是一個均質物體,只計算平均溫升。根據熱平衡原理,電動機運行過程中產生的熱量等于電動機溫度升高吸收的熱量和電動機向周圍介質散發的熱量之和,假定在t時刻電動機的熱功率為p(t),電動機定子繞組的溫升為θ(t),則電動機定子繞組熱平衡微分方程為


式中:p(t)dt 為電動機在dt時間內的總發熱量;cGdθ為電動機溫度升高dθ所吸收的熱量,c 為電動機的比熱容,G 為電動機重量;aSθ(t)dt為電動機在dt時間內的散熱量,a為電動機散熱系數, S為電動機散熱面積 。該微分方程的解為


式中:θw為電動機定子繞組的穩定溫升,θw p(t) /as;θ0為電動機定子繞組的初始溫升; T 為電動機的熱時間常數, T=cG/aS。
假設θm為電動機的允許溫升,θi為電動機定子繞組在△ti時間內的溫升,且在△ti時間內電動機電流保持不變,即具有相同的穩定溫升θw,則
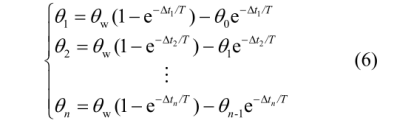

當θn >θm時,電動機溫升超過允許溫升,此時電動機保護裝置動作,保護延時時間為


基于熱積累的熱過載保護在考慮電動機定子繞組發熱的同時,也考慮了電動機向周圍介質的散熱,*可以用來描述電動機運行過程中溫升的真實變化過程。
2 電動機熱過載保護裝置的設計方案
2.1 硬件電路設計
2.1.1 硬件電路的總體設計
電動機熱過載保護裝置硬件電路采用富士通Cortex-M3家族的32 位處理器MB9BF618S 作為核心處理器,完成信號采集、參數配置、數據處理、保護判斷、數據通信等功能。 MB9BF618S的時鐘頻率可達144MHz ,內部集成有128 KB的SRAM 和1 024 KB的FLASH ROM ,含有8個支持UATR 、I 2 C、 SPI等功能的通信接口,含有 24 通道12 位 A/D 轉換器,含有16個基本定時器和3個多功能定時器,集成有2 路以太網控制器 。硬件電路設計采用模塊化設計思想,主要包括交流信號輸入模塊、開關量輸入模塊、繼電器輸出模塊、數據通信模塊和人機交互模塊,其總體結構框圖如圖 1所示 。
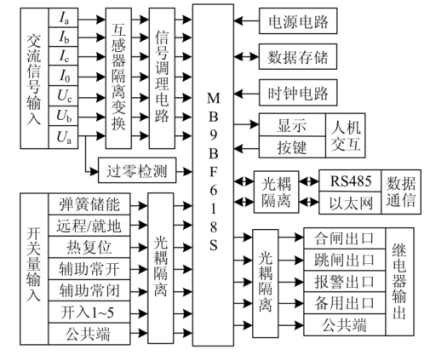

圖 1 硬件電路設計的總體結構框圖
2.1.2 交流信號輸入電路設計
交流信號輸入電路主要由互感器隔離變換電路和信號調理電路構成。在設計電路時,三相輸入電流使用變比為100A/7.07V( 有效值 )的電流互感器,零序電流使用變比為20 A/7.07 V的電流互感器,三相輸入電壓使用變比為120V/7.07V的電壓互感器,利用互感器可以將輸入的電流和電壓信號轉變成幅值為10V 的交流信號,并起強電和弱電隔離作用 。
信號調理電路的作用是將互感器輸出的交流信號轉變為 0~5 V 的單極性電壓信號 , 供MB9BF618S 內置 A/D 轉換器使用。所設計的信號調理電路如圖 2 所示,圖中AIN 表示互感器的輸出信號,6.32 kΩ 和1kΩ構成分壓電路,將- 10 ~10 V的交流信號變為- 1.4~1.4 V 的交流信號,然后經過由運算放大器 TLC4502 構成電壓跟隨器、加法運算、反相比例運算后,變為0.1~2.9 V 的單極性信號,經過由 750Ω電阻和 100nF 電容構成低通濾波電路送至 MB9BF618S 內置A/D轉換器的輸入端。
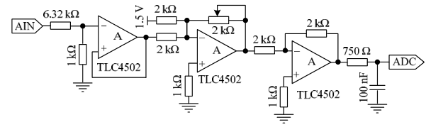

圖 2 輸入信號調理電路
2.1.3 開關量輸入電路設計
開關量輸入電路設計如圖 3 所示,圖中的 DIN是開關量輸入端子, DIC 是開關量輸入公共端, DIO是開關量輸入的輸出端。當 DIN 端有開關量信號 ( 交流 220 V) 輸入時,輸入信號經過限流、整流、濾波后 送 至 光 電 耦 合 器 TLP185GB 的 輸 入 端 ,TLP185GB 導通,輸出端 DIO 變為低電平,通知微處理器有外部開關量輸入。
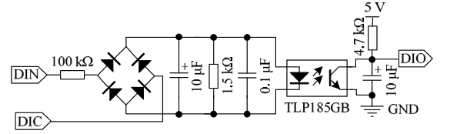

圖 3 開關量輸入電路
2.1.4 繼電器輸出電路設計
繼電器輸出電路包括合閘出口、跳閘出口、出口和備用出口,其中備用出口不影響正常的合閘信號、跳閘信號和告警信號,可以對合閘、跳閘或告警進行出口擴展。繼電器輸出電路設計如圖 4所示,圖中的 DO 是繼電器輸出控制端子,當 DO為低電平時, TLP185GB 導通,在直流電源的作用下,三極管 MMBT5551 導通,繼電器線圈得電,繼電器開關動作。
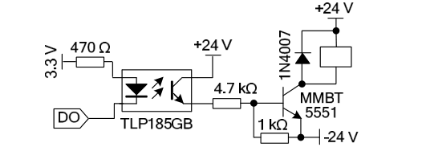

圖 4 繼電器輸出電路
2.1.5 通信接口電路設計
通信接口電路包括 2 路以太網接口和 2 路RS485 總線接口,用于與后臺監控中心進行聯網通信,實現對輸入開關量狀態、保護定值參數設置、繼電器輸出狀態等信息的遠程監控和管理。由于MB9BF618S 集成有 2 路以太網控制器,設計電路時只需外加物理層 (PHY) 芯片及簡單外圍電路可以組成以太網通信電路,物理層芯片選用美國半導體公司生產的 DP83849ID 雙端收發器實現。RS485 總 線 接 口 電 路 使 用 差 分 數 據 收 發 器SN65LBC184D 實現。
2.2 保護算法設計
2.2.1 反時限保護算法
反時限保護算法按照式 (1)~ 式 (3) 計算,用戶可以根據實際使用情況選擇不同的反時限特性,電流采樣值 I 按照全波傅里葉變換算法 ( 全波傅氏算法 )進行計算 [10-12] 。全波傅式算法的基本原理是將周期性信號分解為正弦分量和余弦分量,假設被采樣的周期性電流信號按照傅里葉級數可以分解為
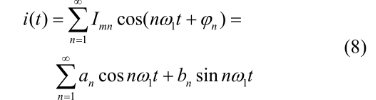

式中:
Imn為各次諧波分量的幅值;na 和nb分別為各次諧波余弦分量和正弦分量的幅值。根據傅里葉級數原理,并進行離散化處理,得到各次諧波的實部 Irn和虛部 Ijn為

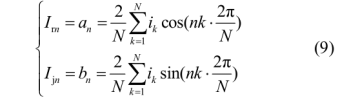
式中, N 為每個周期的采樣點數,在設計時 N =64 。
各次諧波分量的有效值為


由此可以得到電流采樣值 I 為

2.2.2 熱積累保護算法
在熱積累保護模型中,電動機定子繞組的穩定溫升θw 與電動機的熱功率 p(t) 成正比,而 p(t) 與電流 I2 有關。當電動機發生不對稱故障時,定子繞組電流按照對稱分量法可以分為正序分量、負序分量和零序分量,具有相同幅值的正序電流 I+和負序電流 I-在電動機內部產生的熱量并不相同。為了反映正序電流和負序電流的不同發熱效應,英國 GEC公司提出了“等效電流”的概念,即


式中:Ieq為等效電流; K 1 為正序電流發熱系數;K2為負序電流發熱系數。K 1 在電動機啟動過程中取值 0.5( 用以避開正常的啟動電流 ) ,在電動機啟動結束后取值 1.0 ;K2取值為 3~10 ,一般取值為 6 。在熱積累保護算法中,當電動機發生不對稱熱過載時,用等效電流Ieq 來代替定子繞組電流 I ,在電動機處于冷態情況下 ( 熱積累為 0) 時,根據經驗,熱過載保護的動作時間為


式中: td 為熱過載保護的動作時間; T 為電動機熱時間常數; Ieq為等效發熱電流; Ie為電動機二次側額定電流 。
按照式 (13) 進行的熱過載保護具有熱積累記憶功能,當電動機因過熱保護動作跳閘后,不能立即再次啟動,需要等到熱積累量減少到允許再啟動整定值時才能再次啟動。如果需要緊急啟動,可以通過熱復位開關量輸入強行把熱積累值清零。
3 熱過載保護的測試數據
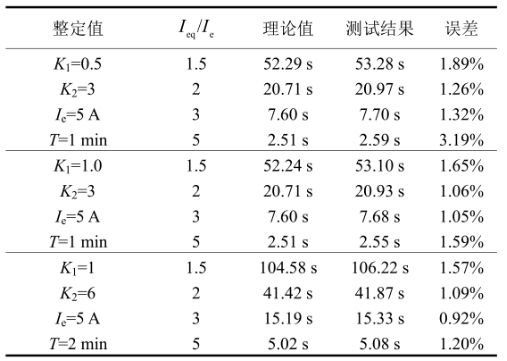
按照標準 GB/T 7261-2008 繼電保護和安全自動裝置基本試驗方法和 GB/T 10736-2007 低壓電動機保護器中的相關試驗方法和要求,對所設計的低壓電動機熱過載保護裝置進行了測試。基于電流反時限特性的熱過載保護測試結果如表 1 所示,基于熱積累模型的熱過載保護測試結果如表 2 所示,從測試結果中可以看出,測試誤差不超過理論值的 5% ,能夠滿足相關的技術要求。
表 1 電流反時限模型測試數據

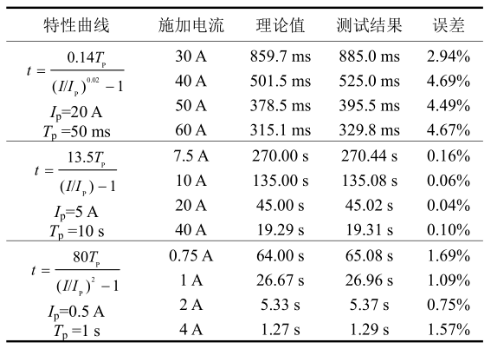
表 2 熱積累模型測試數據

4安科瑞智能電動機保護器介紹
4.1產品介紹
智能電動機保護器(以下簡稱保護器),采用單片機技術,具有抗干擾能力強、工作穩定可靠、數字化、智能化、網絡化等特點。保護器能對電動機運行過程中出現的過載、斷相、不平衡、欠載、接地/漏電、堵轉、阻塞、外部故障等多種情況進行保護,并設有SOE故障事件記錄功能,方便現場維護人員查找故障原因。適用于煤礦、石化、冶煉、電力、以及民用建筑等領域。本保護器具有RS485遠程通訊接口,DC4-20mA模擬量輸出,方便與PLC、PC等控制機組成網絡系統。實現電動機運行的遠程監控。
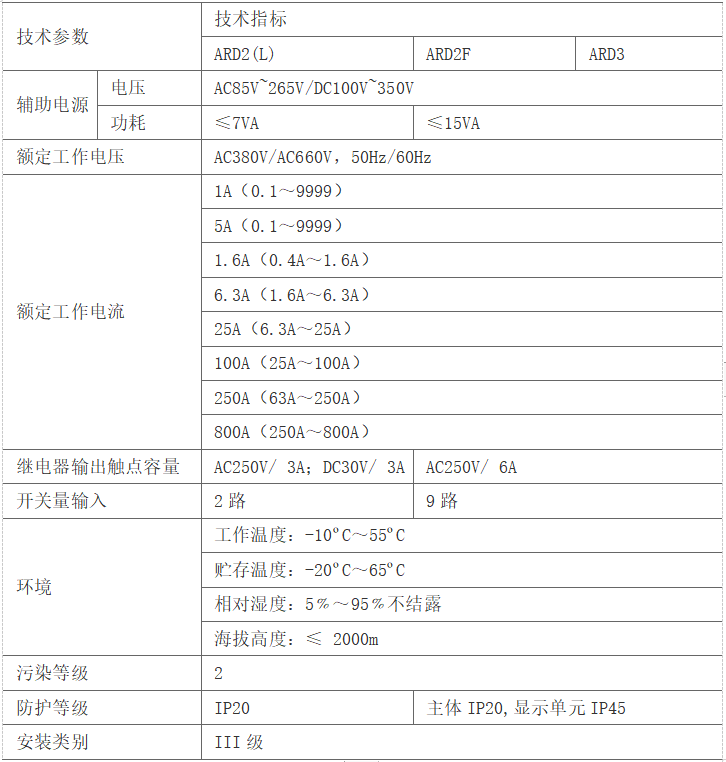
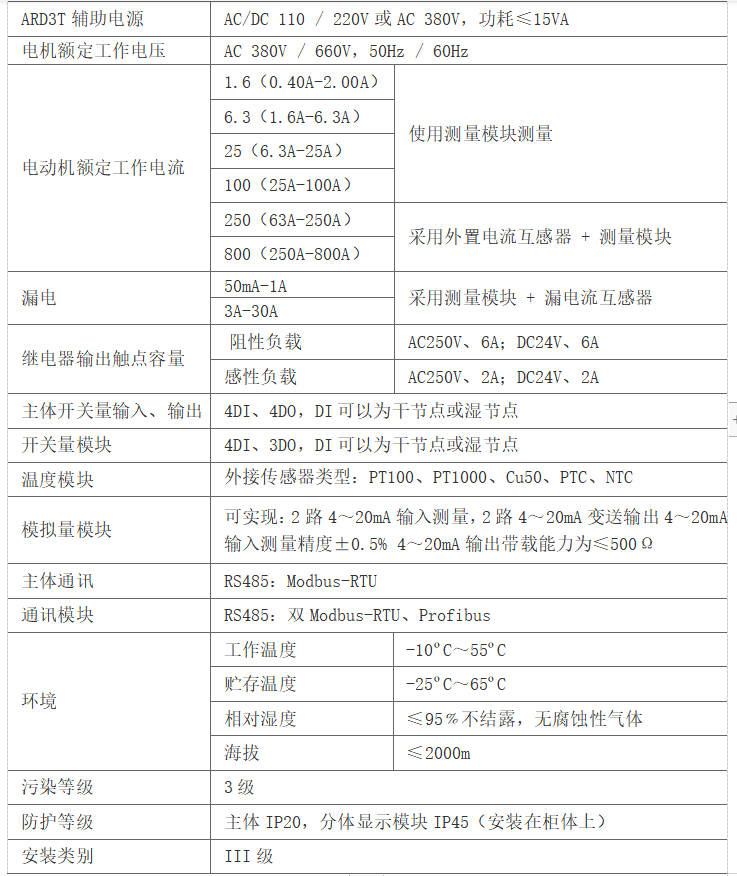
4.2技術參數
4.2.1數字式電動機保護器

4.2.2模塊式電動機保護器

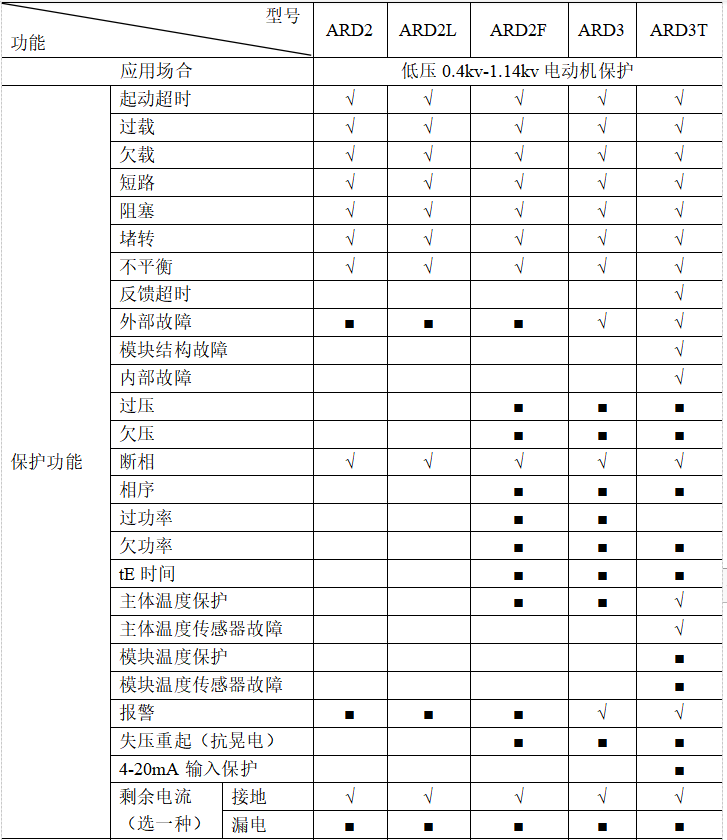
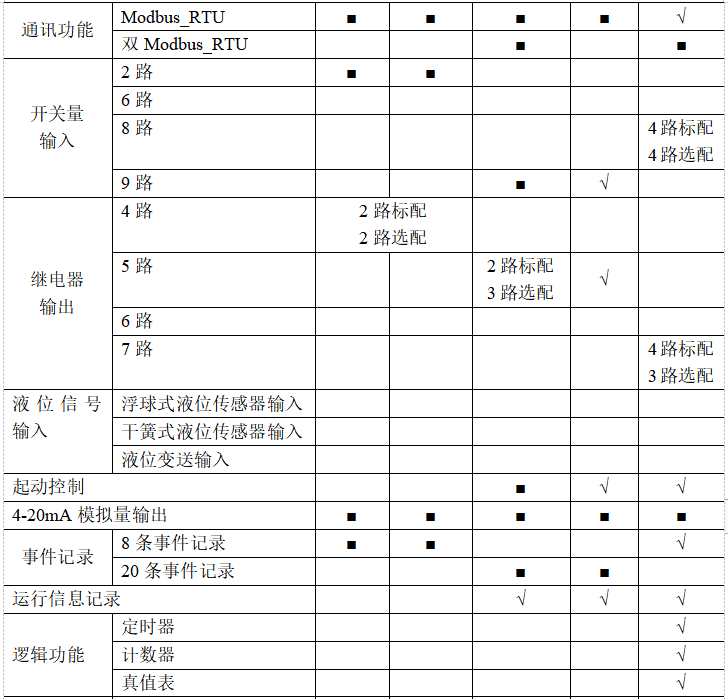
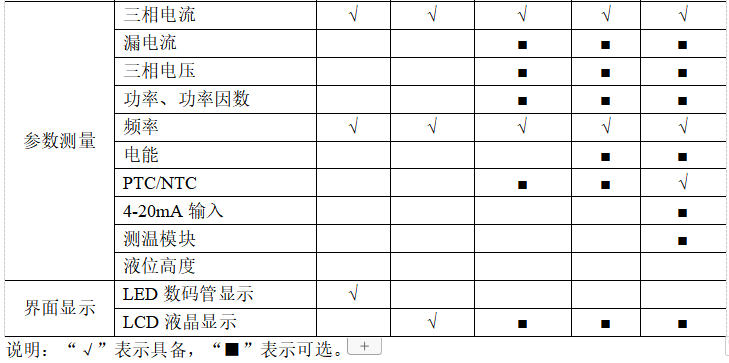
4.3 產品選型



5結語
本文根據低壓異步電動機工作時的發熱特性設計了一種熱過載保護裝置,該保護裝置提供了基于電流反時限特性和基于熱積累模型的兩種保護方案,用戶可以根據實際需要進行選擇。該保護裝置除了具有熱過載保護功能外,還具有啟動超時保護、堵轉保護、負序過流保護、低電壓保護和高電壓保護等功能,能夠滿足低壓異步電動機在運行過程中對保護的要求,具有較高的應用價值。
參考文獻
[1]李愛平, 余闖, 徐立云, 等. 低壓電動機反時限過流保護算法及其實現的研究[J]. 中國工程機械學報, 2011,9(3): 262-266.
[2]張天鵬 ,翟亞芳 ,郝申軍.低壓電動機熱過載保護裝置的研究與設計
[3]安科瑞企業微電網設計與應用手冊.2020.06版
 您的位置:
您的位置:
